





Safe Robot Learning
Learning can be used to improve the performance of a robotic system in a complex environment. However, providing safety guarantees during the...
Multiagent Coordination and Learning
There are tasks that cannot be done by a single robot alone. A group of robots collaborating on a task has the potential of being highly efficient,...

Vision-Based Autonomous Flight
We use vision to achieve robot localization and navigation without using external infrastructure. Our ground robot experiments localize based on 3D...
Music in Motion: Dancing Quadrocopters
This project features agile, multi-vehicle flight performances that are designed and executed to music. We develop motion planning, control and...

Aerial Robotics Applications
This series of projects aims to address the critical challenges of deploying aerial robotics in various applications or industries. Mining This...

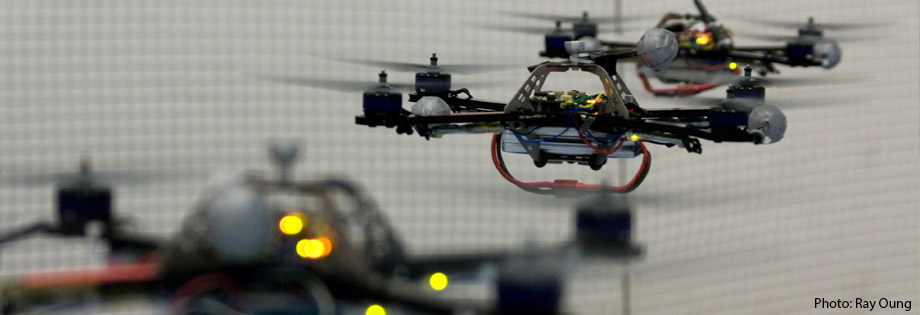
Aerial and Ground Robot Racing
This project explores the physical limits of ground and aerial robots. When operating robots in these regimes, unknown dynamic effects (for example,...