
Mobile Manipulation

We enable robots to move around the environment while manipulating and interacting with objects. Our work includes nonprehensile manipulation, which means the manipulated objects are not fully grasped, and includes actions like pushing, catching, and balancing. We have also developed methods for hierarchical task planning and object pose estimation.
Related Publications
Mobile manipulators are envisioned to serve more complex roles in people’s everyday lives. With recent breakthroughs in large language models, task planners have become better at translating human verbal instructions into a sequence of tasks. However, there is still a need for a decision-making algorithm that can seamlessly interface with the high-level task planner to carry out the sequence of tasks efficiently. In this work, building on the idea of nonlinear lexicographic optimization, we propose a novel Hierarchical-Task Model Predictive Control framework that is able to complete sequential tasks with improved performance and reactivity by effectively leveraging the robot’s redundancy. Compared to the state-of-the-art task-prioritized inverse kinematic control method, our approach has improved hierarchical trajectory tracking performance by 42\% on average when facing task changes, robot singularity, and reference variations. Compared to a typical single-task architecture, our proposed hierarchical task control architecture enables the robot to traverse a shorter path in task space and achieves an execution time 2.3 times faster when executing a sequence of delivery tasks. We demonstrated the results with real-world experiments on a 9 degrees of freedom mobile manipulator.
@article{du-ral24,
author={Xintong Du and Siqi Zhou and Angela P. Schoellig},
journal={{IEEE Robotics and Automation Letters}},
title={Hierarchical Task Model Predictive Control for Sequential Mobile Manipulation Tasks},
year={2024},
volume={9},
number={2},
pages={1270--1277},
doi={10.1109/LRA.2023.3342671},
abstract={Mobile manipulators are envisioned to serve more complex roles in people's everyday lives. With recent breakthroughs in large language models, task planners have become better at translating human verbal instructions into a sequence of tasks. However, there is still a need for a decision-making algorithm that can seamlessly interface with the high-level task planner to carry out the sequence of tasks efficiently. In this work, building on the idea of nonlinear lexicographic optimization, we propose a novel Hierarchical-Task Model Predictive Control framework that is able to complete sequential tasks with improved performance and reactivity by effectively leveraging the robot's redundancy. Compared to the state-of-the-art task-prioritized inverse kinematic control method, our approach has improved hierarchical trajectory tracking performance by 42\% on average when facing task changes, robot singularity, and reference variations. Compared to a typical single-task architecture, our proposed hierarchical task control architecture enables the robot to traverse a shorter path in task space and achieves an execution time 2.3 times faster when executing a sequence of delivery tasks. We demonstrated the results with real-world experiments on a 9 degrees of freedom mobile manipulator.}
} ![]() Keep it upright: model predictive control for nonprehensile object transportation with obstacle avoidance on a mobile manipulatorA. Heins and A. P. SchoelligIEEE Robotics and Automation Letters, vol. 8, iss. 12, p. 7986–7993, 2023.
Keep it upright: model predictive control for nonprehensile object transportation with obstacle avoidance on a mobile manipulatorA. Heins and A. P. SchoelligIEEE Robotics and Automation Letters, vol. 8, iss. 12, p. 7986–7993, 2023.
![]()
![]()
![]()
![]()
![]()
![]()
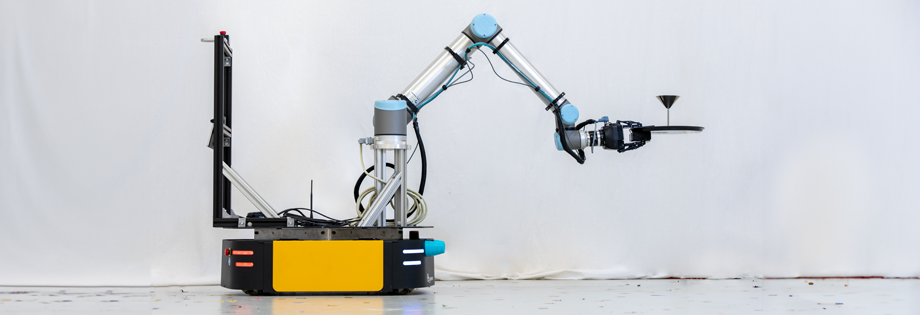
We consider a nonprehensile manipulation task in which a mobile manipulator must balance objects on its end effector without grasping them—known as the waiter’s problem—and move to a desired location while avoiding static and dynamic obstacles. In contrast to existing approaches, our focus is on fast online planning in response to new and changing environments. Our main contribution is a whole-body constrained model predictive controller (MPC) for a mobile manipulator that balances objects and avoids collisions. Furthermore, we propose planning using the minimum statically-feasible friction coefficients, which provides robustness to frictional uncertainty and other force disturbances while also substantially reducing the compute time required to update the MPC policy. Simulations and hardware experiments on a velocity-controlled mobile manipulator with up to seven balanced objects, stacked objects, and various obstacles show that our approach can handle a variety of conditions that have not been previously demonstrated, with end effector speeds and accelerations up to 2.0 m/s and 7.9 m/s^2 , respectively. Notably, we demonstrate a projectile avoidance task in which the robot avoids a thrown ball while balancing a tall bottle.
@article{heins-ral23,
author = {Adam Heins and Angela P. Schoellig},
title = {Keep It Upright: Model Predictive Control for Nonprehensile Object Transportation With Obstacle Avoidance on a Mobile Manipulator},
journal = {{IEEE Robotics and Automation Letters}},
year = {2023},
volume = {8},
number = {12},
pages = {7986--7993},
urllink = {https://doi.org/10.1109/LRA.2023.3324520},
urlvideo = {http://tiny.cc/keep-it-upright},
urlcode = {https://github.com/utiasDSL/upright},
doi = {10.1109/LRA.2023.3324520},
abstract = {We consider a nonprehensile manipulation task in which a mobile manipulator must balance objects on its end effector without grasping them—known as the waiter's problem—and move to a desired location while avoiding static and dynamic obstacles. In contrast to existing approaches, our focus is on fast online planning in response to new and changing environments. Our main contribution is a whole-body constrained model predictive controller (MPC) for a mobile manipulator that balances objects and avoids collisions. Furthermore, we propose planning using the minimum statically-feasible friction coefficients, which provides robustness to frictional uncertainty and other force disturbances while also substantially reducing the compute time required to update the MPC policy. Simulations and hardware experiments on a velocity-controlled mobile manipulator with up to seven balanced objects, stacked objects, and various obstacles show that our approach can handle a variety of conditions that have not been previously demonstrated, with end effector speeds and accelerations up to 2.0 m/s and 7.9 m/s^2 , respectively. Notably, we demonstrate a projectile avoidance task in which the robot avoids a thrown ball while balancing a tall bottle.}
} ![]() Multi-view keypoints for reliable 6D object pose estimationA. Li and A. P. Schoelligin Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2023, p. 6988–6994.
Multi-view keypoints for reliable 6D object pose estimationA. Li and A. P. Schoelligin Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2023, p. 6988–6994.
![]()
![]()
![]()
6D Object pose estimation is a fundamental component in robotics enabling efficient interaction with the environment. 6D pose estimation is particularly challenging in bin- picking applications, where many objects are low-feature and reflective, and self-occlusion between objects of the same type is common. We propose a novel multi-view approach leveraging known camera transformations from an eye-in-hand setup to combine heatmap and keypoint estimates into a probability density map over 3D space. The result is a robust approach that is scalable in the number of views. It relies on a confidence score composed of keypoint probabilities and point-cloud alignment error, which allows reliable rejection of false positives. We demonstrate an average pose estimation error of approximately 0.5 mm and 2 degrees across a variety of difficult low-feature and reflective objects in the ROBI dataset, while also surpassing the state-of-art correct detection rate, measured using the 10\% object diameter threshold on ADD error.
@inproceedings{li-icra23,
author={Alan Li and Angela P. Schoellig},
booktitle={{Proc. of the IEEE International Conference on Robotics and Automation (ICRA)}},
title={Multi-View Keypoints for Reliable {6D} Object Pose Estimation},
year={2023},
pages={6988--6994},
doi={10.1109/ICRA48891.2023.10160354},
abstract={6D Object pose estimation is a fundamental component in robotics enabling efficient interaction with the environment. 6D pose estimation is particularly challenging in bin- picking applications, where many objects are low-feature and reflective, and self-occlusion between objects of the same type is common. We propose a novel multi-view approach leveraging known camera transformations from an eye-in-hand setup to combine heatmap and keypoint estimates into a probability density map over 3D space. The result is a robust approach that is scalable in the number of views. It relies on a confidence score composed of keypoint probabilities and point-cloud alignment error, which allows reliable rejection of false positives. We demonstrate an average pose estimation error of approximately 0.5 mm and 2 degrees across a variety of difficult low-feature and reflective objects in the ROBI dataset, while also surpassing the state-of-art correct detection rate, measured using the 10\% object diameter threshold on ADD error.}
} Catch the ball: accurate high-speed motions for mobile manipulators via inverse dynamics learningK. Dong, K. Pereida, F. Shkurti, and A. P. Schoelligin Proc. of the IEEE International Conference on Intelligent Robots and Systems (IROS), 2020, p. 6718–6725.
![]()
![]()
![]()
![]()
![]()
![]()
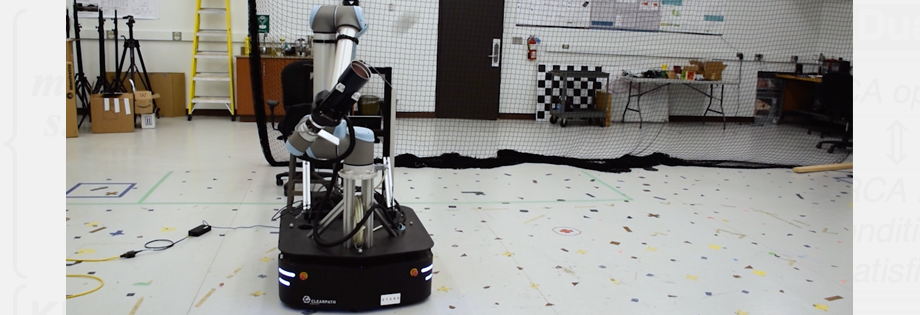
Mobile manipulators consist of a mobile platform equipped with one or more robot arms and are of interest for a wide array of challenging tasks because of their extended workspace and dexterity. Typically, mobile manipulators are deployed in slow-motion collaborative robot scenarios. In this paper, we consider scenarios where accurate high-speed motions are required. We introduce a framework for this regime of tasks including two main components: (i) a bi-level motion optimization algorithm for real-time trajectory generation, which relies on Sequential Quadratic Programming (SQP) and Quadratic Programming (QP), respectively; and (ii) a learning-based controller optimized for precise tracking of high-speed motions via a learned inverse dynamics model. We evaluate our framework with a mobile manipulator platform through numerous high-speed ball catching experiments, where we show a success rate of 85.33\%. To the best of our knowledge, this success rate exceeds the reported performance of existing related systems and sets a new state of the art.
@INPROCEEDINGS{dong-iros20,
author = {Ke Dong and Karime Pereida and Florian Shkurti and Angela P. Schoellig},
title = {Catch the Ball: Accurate High-Speed Motions for Mobile Manipulators via Inverse Dynamics Learning},
booktitle = {{Proc. of the IEEE International Conference on Intelligent Robots and Systems (IROS)}},
year = {2020},
pages = {6718--6725},
urlvideo = {https://www.youtube.com/watch?v=4uCvzurthS4},
urlvideo2 = {https://youtu.be/LlWN3cGUIbk},
urllink = {https://arxiv.org/abs/1811.01273},
abstract = {Mobile manipulators consist of a mobile platform equipped with one or more robot arms and are of interest for a wide array of challenging tasks because of their extended workspace and dexterity. Typically, mobile manipulators are deployed in slow-motion collaborative robot scenarios. In this paper, we consider scenarios where accurate high-speed motions are required. We introduce a framework for this regime of tasks including two main components: (i) a bi-level motion optimization algorithm for real-time trajectory generation, which relies on Sequential Quadratic Programming (SQP) and Quadratic Programming (QP), respectively; and (ii) a learning-based controller optimized for precise tracking of high-speed motions via a learned inverse dynamics model. We evaluate our framework with a mobile manipulator platform through numerous high-speed ball catching experiments, where we show a success rate of 85.33\%. To the best of our knowledge, this success rate exceeds the reported performance of existing related systems and sets a new state of the art.},
}